One Mesh, Every Domain
WRAITHWATCH is not a single drone — it's a family of autonomous platforms that share one explainable autonomy stack, the Null Mesh. Each platform carries the same brain and talks on the same self-healing mesh, so an air unit, a ground unit and a sea unit can hand a single fused track between them. Concept designs below.
🛰️ Symbiote — Carrier Recon UAV
The bigger bird that brings the swarm. Symbiote is a heavy recon UAV that flies in first, scouts and clears a landing zone, then releases a cloud of smaller Mote recon drones for fast, fanned-out perimeter reconnaissance — one carrier seeding many eyes. Host and swarm share the one Null Mesh, so every drone it deploys reports straight back into the same fused picture.
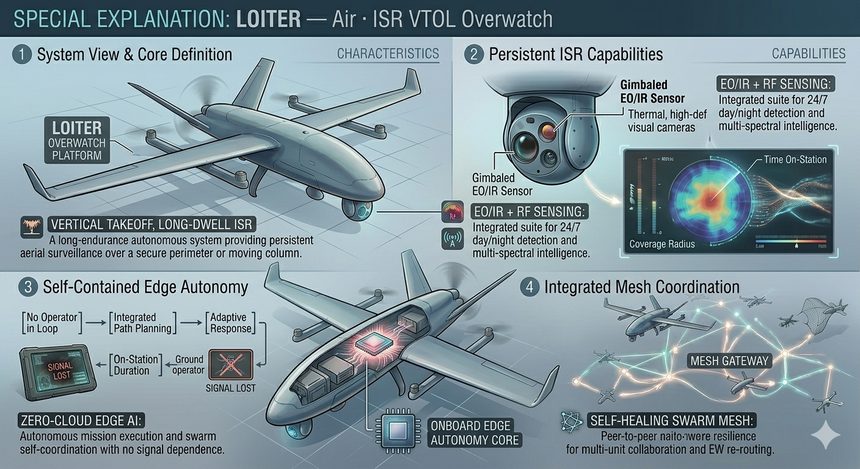
Loiter — VTOL Overwatch
Vertical-launch, long-dwell ISR platform for persistent surveillance over a fixed perimeter or moving column. Onboard edge autonomy keeps it on-station with no operator in the loop and no signal to home.
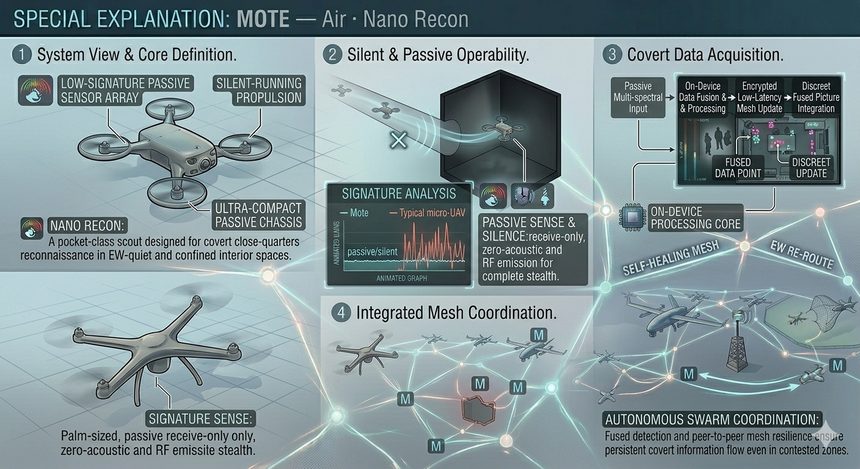
Mote — Nano Recon
A pocket-class recon drone for room-and-corner reconnaissance where a larger airframe can't go. Passive, near-silent, receive-only sensing — a scout that doesn't announce itself.
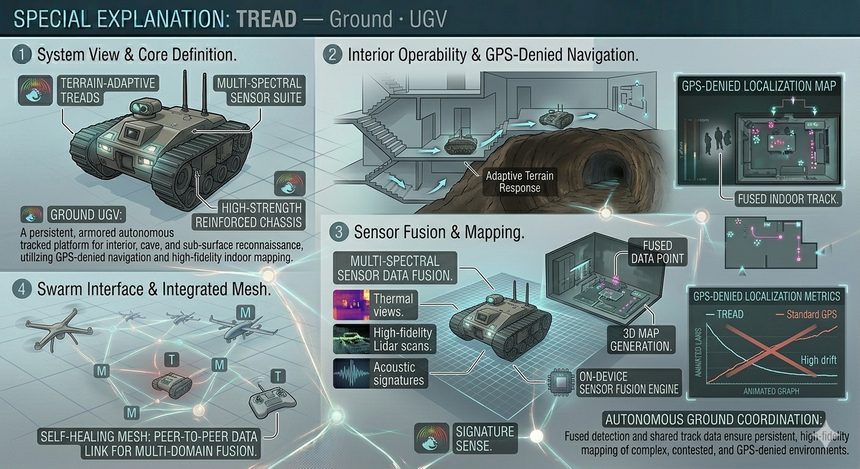
Tread — Ground Unit
An autonomous ground vehicle for interior sweeps, tunnels and EW-quiet zones where the sky view is gone. Shares the same controller and the same fused track as its air and sea siblings.
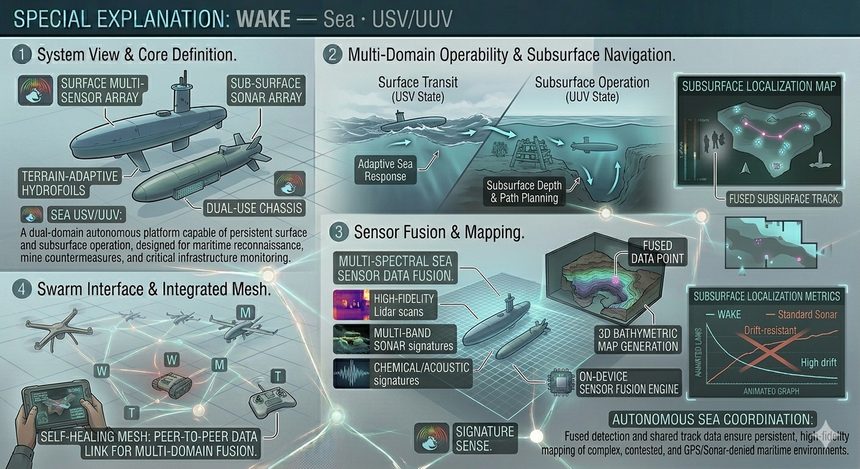
Wake — Maritime Unit
A persistent uncrewed surface/sub-surface platform for sea-lane watch and 360° passive day/night sensing. Extends the mesh past the shoreline — the domain the air primes leave open.
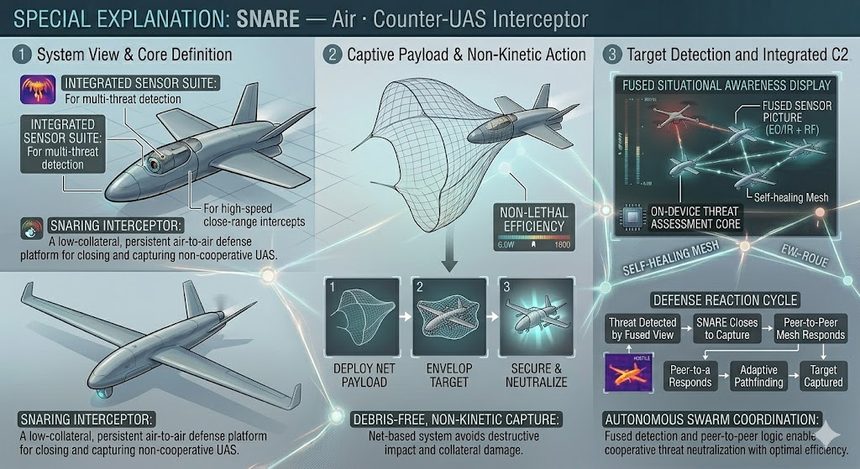
Snare — Interceptor
A defensive, non-kinetic counter-drone concept: detect an intruding UAS on the fused picture, then close and capture it — debris-free, defend-not-destroy. Strictly a defensive interception concept.
Snare — Laser Defense Subsystem
Threat Model: Incoming laser-guided autonomous threats, laser designators, and laser-targeting swarms operating in GPS-denied / jamming-heavy environments. Defense Layers:
- Detection (MWIR/LWIR): Multi-spectral thermal imaging scans for active laser emitters and targeting-laser reflections; a locked laser signature triggers immediate mesh alert.
- Hardening (Optical): Reflective/absorptive nano-coatings reduce laser signature; sensor dome diffusion breaks point-source targeting; IR emitter shielding masks thermal signature.
- Evasion (Ballistic): Laser-warning receiver (LWR) triggers adaptive vector randomization — altitude, bearing, spiral climb to break targeting lock; passive IR flares and smoke deploy on sustained paint.
- Jamming (Active): Optical jammer array floods threat wavelength with coherent noise; thermal decoy flare patterns mimic platform signature to saturate tracker.
- Coordination (Mesh): Detection and evasion broadcast to swarm via self-healing Coil mesh; all units near the threat vector apply coordinated evasion so no single unit is isolated.
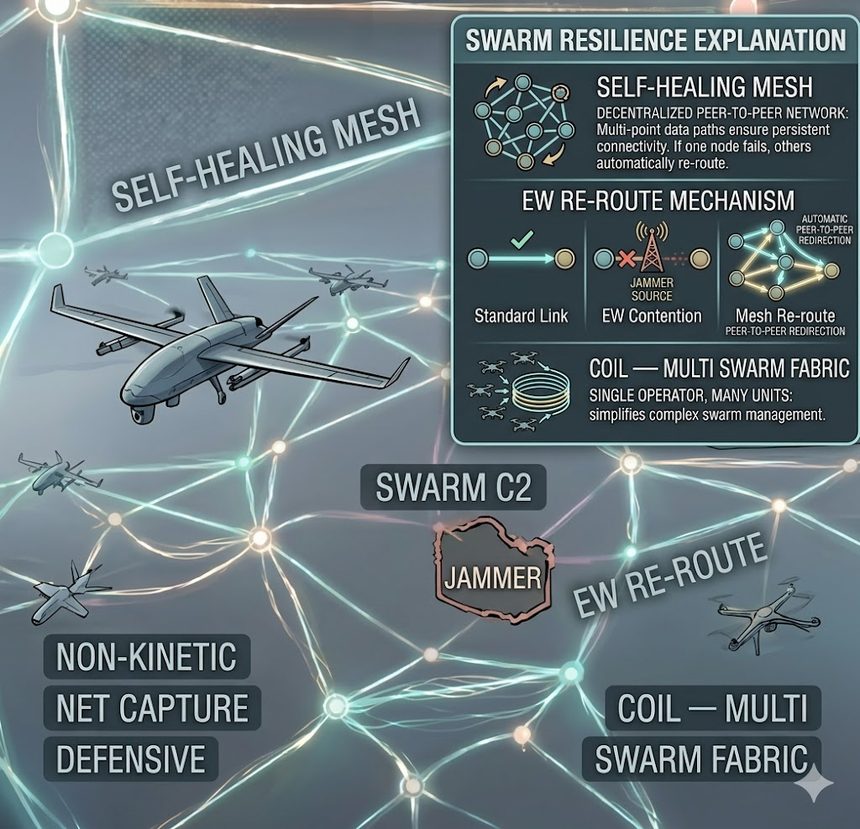
Coil — Swarm Fabric
Not an airframe — the coordination layer. Many units, one operator, one self-healing mesh that survives jamming by re-routing peer-to-peer. The swarm is the sensor; fusion is the eye.